岁月如梭,光阴似箭,又一个期盼的暑假来临,对于每个学生来说,意味着可以尽情享受自由的时光。然而,为时光荏苒,光阴匆匆的求学阶段增添一抹壮丽色彩,在学校五号楼的先端院实验室,炎炎的夏日里,先端院热情洋溢的研究生们全身心投入科研工作,实验如火如荼,在学科竞赛中获得出色的成绩,不断产出学术研究成果。这一幕,成为2023年北部湾大学夏天校园中最美丽的风景,展现先端院青年学子在学术上进取的坚定决心,为社会做出更大贡献的远大理想。
一、科学研究,珍惜当“夏”
1.科学研究
先端院视觉伺服小组2020级博士研究生罗俊琦正在阅读视觉伺服抓取相关文献。传统的机器人控制一般使用视觉再现方式。这种方法精度很高但缺乏灵活性。后来将CCD相机用到机器人上带有视觉功能的机器人技术成为研究热点。而视觉伺服与传统的视觉反馈的不同之处在于图像的处理与信息的反馈是同时进行的控制精度、灵活性以及鲁棒性都有了较大提高。
先端院2021级博士夏宇正在阅读无人机器人编队和集群控制方面的文献,随着无人设备行业的高速发展,多机器人、编队、集群以及协作等应用频率越来越高。特别是无人集群系统,在灾情救援、智能物流和消费娱乐等方面展现出了极大的应用场景。

先端院2022级博士研究生ISMAIL MOHAMED ABDIRAHMAN正在阅读人类活动识别的相关文献。通过文献阅读,编写并执行相关代码,以此获得对推动我们努力的总体目标的全面理解。
先端院2022级博士研究生李派霞正在阅读船舶航向控制的相关文献。通过文献阅读,建立船舶运动数学模型及仿真模型,全面学习、理解船舶运动控制的精髓。
无人系统实验室里的22级机械研究生马涛和22级机械研究生吴肖,正在研究slam小车的定位和建图功能。该slam小车搭载了激光雷达、深度相机、IMU等多个传感器,其具备在一个未知的环境里自主导航并进行同时定位和建图的功能。Slam在现代的无人驾驶领域非常火爆,可研究的前景性非常强。

先端院2021级软件工程研究生祁伟伟正在指导师弟吴肖的小论文,2022级机械硕士吴肖,根据自己的研究方向在暑期完成了小论文的撰写,现就其中的有关论文实验和格式方面的问题向师兄请教。

机械方向的2022级硕士谈吴康最近在使用matlab构建控制器,应用在波浪滑翔器上;船海方向的2022级硕士诸泽亮正在学习Ansys Fluent对波浪滑翔器翼板在各种条件的浪环境下的模拟情况。一人主打控制方向,一人更关注于结构,两个人也时常热烈讨论交换波浪滑翔器的意见。虽然小方向不同在接下来的两年他们合作一定也会亲密无间。

机械方向的2021级硕士何从伟在教导诸泽亮使用3d打印机打印模型,上图是正在工作中的3d打印机。

机械方向的2022级硕士白文豪和李亮在进行ur3机械臂实验。

2.专家来访
日本神奈川大学张善俊教授来校进行访问交流,张善俊教授是日本北海道大学工学博士,中国长江大学客座教授、波士顿大学在外研究员。
欢迎张善俊教授来到北部湾大学

张善俊教授与视觉伺服小组成员进行学术交流
3.学术交流

研究生Seminar研讨会
7月8日暑期第一次组会:将不同研究方向分为三个小组(海洋机器人小组、无人系统小组、视觉伺服小组)每个周轮流汇报学习进度,并给各小组任命一名负责人。要求博士生积极申报基金项目,硕士生利用好暑假时间出成果。视觉伺服小组学生汇报关于力封闭相关内容。
7月14日暑期第二次组会:无人系统小组学生汇报关于路面裂缝巡检机器人的相关内容,老师进行指导并要求该方向的两名学生要各有分工。每个小组对自己实验室课题进行介绍,并对即将来进行学习交流的日本专家行程进行安排。
7月21日暑期第三次组会:视觉伺服小组学生汇报关于水果检测算法相关内容。要求学生调研人类抓取与力平衡、力封闭与形封闭之间的关系。
7月28日暑期第四次组会:海洋机器人小组学生进行腿足机器人的模型演示,以及对LOS算法在波浪滑翔器的应用进行讨论,最后介绍了波浪滑翔器的水翼运动仿真。
8月3日暑期第五次组会:无人系统小组学生汇报近期阅读的文献,并对文章的内容以及创新点进行介绍,最后对基于改进RRT算法的无人机路径规划问题进行讨论。
8月11日暑期第六次组会:老师提醒各位在校同学注意身体,并让三位博士生协助即将到来的张善俊教授进行学习和调研。视觉伺服小组学生汇报关于使用极坐标的基于图像的视觉伺服,以及让机器人学习人类手的快速抓取技能的相关内容。
8月18日暑期第七次组会:每个小组由博士牵头,将暑假学习成果进行总结,海洋机器人小组对波浪滑翔器的国内外研究现状及应用场景进行介绍,会上张善俊教授及老师对学生进行指导。
8月25日暑期第八次组会:总结暑期的竞赛及科研成果,并让海洋机器人小组做一个研究计划,学生汇报关于路面检测算法相关问题。
9月1日暑期第九次组会:视觉伺服小组学生汇报关于人类抓取的相关论文,将人手抓取与机械手抓取进行对比,对论文中的创新点进行介绍,并对该创新点应用到其他场景的可能性进行讨论。
4.专家讲座
日本工程院外籍院士、长崎综合科学大学研究生院工学研究科刘震教授来校交流,刘震教授是日本国立东北大学博士(信息科学)。曾任吉林工业大学计算机科学与工程系助教、讲师、副教授,日本国立东北大学工学部助教。吉林大学唐敖庆讲座教授、四川大学客座教授。日本工程院(EAJ)外籍院士。IEEE Computer Society、日本信息处理学会(IPS)、人工智能学会(JSAI)、电子信息通信学会(EIC)会员。此次给湾大同学们讲浅析大数据背景下人工智能发展的特点、趋势,以及人工智能带给我们的新机遇与新挑战,为大家更好地迎合新时代机遇和挑战。

刘震院士为同学们做学术讲座
日本神奈川大学张善俊教授20多年来一直从事机器人视觉、机器人及图像处理等方面的研究,发表相关论文20余篇,此次张教授的访问交流,帮助北部湾大学的同学们开拓了视野,增加了新的科研思路。

张善俊教授为同学们做学术讲座
韩永飞教授来北部湾大学进行访问交流,韩永飞教授是中国第二批千人计划国家特骋专家,伦敦大学密码学和信息安全博士,曾任德国马普科学院教授,法国GEMPLUS首席科学家,新加坡银行安全联席委员会主席,欧盟项目三代移动通讯安全的七名参加者之一,公开密钥DPA攻击的发明人之一,指令分析法攻击技术的发明人,ICICS、ACNS和Intrust三个国际会议创立人和指导委员会成员。此次给湾大同学们分享了数字时代的WebX和AI,让同学们对WebX和AI中紧密的联系与应用,以及未来市场前景。
韩永飞教授为同学们做学术讲座
5.论文发表
先端院2020级博士研究生罗俊琦在SCI期刊《EEE Transactions on Instrumentation&Measurement》上投稿“Robot Visual Servoing Grasping based on Top-Down Keypoint Detection Network”论文,该论文本文提出了一种关键点检测网络驱动的视觉伺服抓取框架。首先,我们开发了一种有效的两级关键点检测器用于对目标的稀疏图像平面特征进行实时推理随后,采用低通滤波算法平滑检测到的关键点。这些处理的关键点,然后使用基于图像的视觉伺服控制器来计算机器人的关节速度,使精确跟踪。使用域随机化技术构建了一个专门用于训练和评估的数据集,包括6个类别的11000个样本。全面的实验表明,该探测器的低延迟和准确的性能,即使在低照明,过度曝光,部分遮挡,和密集的环境。静态和动态抓取实验进一步验证了该框架在未知手眼标定条件下的有效性。
先端科学技术研究院2021级博士研究生夏宇在SCI期刊《Signal Processing》投稿学术论文“A Multi-Sensor Fusion Framework with Tight Coupling for Precise Positioning and Optimization”,提出了一种由基于点线特征紧耦合的激光视觉惯性里程计、视觉激光融合的回环检测和因子图后端优化组成的基于多传感器融合的SLAM框架。两个子系统紧密耦合形成了激光视觉惯性里程计融合系统。此外,针对视觉和激光各自回环检测的缺陷,提出了视觉激光融合的双回环检测方法,采用了DBoW2的词袋模型,并通过时空一致性检查来提高检测效率和准确性。对于室外大场景,引入了GNSS因子进行全局约束。
先端院2021级软件工程研究生祁伟伟在SCI期刊《Pervasive and Mobile Computing》上发表“Secure and efficient blockchain-based consensus scheme forMWSNs with clustered architecture”论文,该论文是关于传感器设备高移动性、资源有限和物理防御薄弱等问题危害移动无线传感网络簇链通信。论文设计了一种依据从环境信息中生成的有效数据量进行币分配的“信息证明”变体以实现公平的矿工竞选。同时引入了结合动态综合信誉的过滤机制防止恶意节点渗入最终共识组。
先端院2021级研究生何丛伟参加17th International Conference on Innovative Computing, Information and Control (ICICIC2023)国际会议。论文“Research on Model and Simulation of Series Elastic Actuator with HysteresisSpring”在分会场《Assistive Engineering and Information Technology》上发表交流。该Session是关于辅助工程和信息技术的专业交流分会议,通过此次会议也让何从伟同学受益颇多。
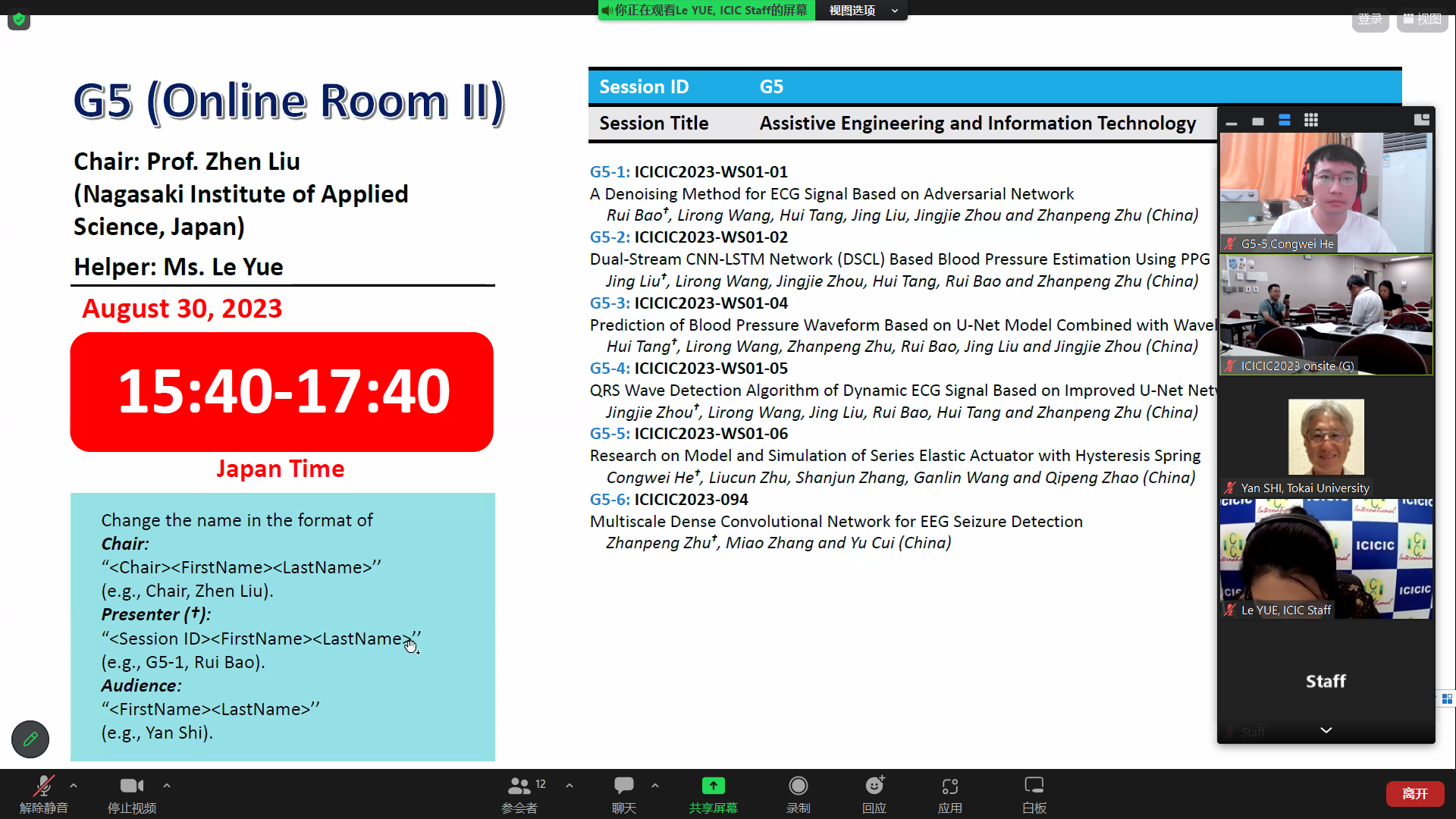
先端院21级研究生何从伟参加国际会议
先端院2021级机械工程研究生经展鹏在“2023 International Conference on Algorithm, Image Processing and Machine Vision(AIPMV2023)”发表一篇EI论文“Research on YOLOV7-tiny Fruit Detection Algorithm Improved by α-IoU”,该论文针对YOLO算法在水果检测任务中存在的检测精度较低、对密集遮挡物体定位不准等问题,将YOLOV7-tiny算法的原有损失函数替换为AlpHaIoU损失函数,优化了模型边界框回归,加快模型收敛的同时提高了训练精度。实验结果验证了改进算法的有效性,改进后的Yolov7-tiny算法mAP值由91.9%提高到93.7%。同时改进后的算法的精确率,召回率以及mAP值相比较原算法明显收敛速度更快,收敛效果更好,提高了原有算法在水果数据集上的检测性能。但是改进后的Yolov7-tiny算法在检测精度和速度上依然存在提升空间,现有水果数据集的目标数量和目标类别较少,仍然需要进一步的研究与改进。
先端院2022级机械专业研究生马涛在“2023 6th International Conference on Computer Information Science and Artificial Intelligence”发表一篇EI论文“Research on Pavement Crack Detection Algorithm Based on Improved Yolov5”,该论文提出一种基于改进Yolov5s网络模型的路面裂缝检测算法。该算法引入了加权的双向特征金字塔网络作为颈部特征网络,用于融合不同维度的特征图,从而增强底部特征信息,提高特征聚合效果。此外,还采用了注意力机制,加强对路面裂缝图像特征信息的学习和提取,同时减弱了与裂缝相似的路面背景对检测结果的影响。通过在自制数据集上的试验结果表明,改进后的yolov5s模型在准确率、召回率和平均精度值方面都比原模型有所提高。
先端院2022级机械工程研究生吴肖在“The 3rd International Conference on Applied Mathematics, Modeling and Computer Simulation (AMMCS 2023)”发表一篇EI论文“Research On Pavement Crack Detection Based On Improved YOLOv5s”,该论文是为解决路面裂缝漏检、错检、精度低的问题。提出了一种基于YOLOv5s改进的裂缝检测模型。论文设计基于将坐标注意力(Coordinate Attention, CA)模块融合在C3上,使位置信息加入到通道注意力中,使其更加关注对细小裂缝在位置和通道上的信息,提高网络的特征表达能力并增强对裂缝关键信息的提取,引入PSA(Pyramid Split Attention)模块提取裂缝多尺度特征的空间信息并有效建立多尺度通道注意力间的长期依赖关系。
先端院2022级机械专业学生李亮在“The 2023 International Conference on Mechatronics, Control Engineering and Artificial Intelligence”发表一篇国际会议论文“An Optimized Control Strategy for Image-Based Visual Servoing Using Polar Coordinates”,该论文是关于机器人视觉伺服,在基于图像的视觉伺服中,机械臂在绕光轴进行大旋转量的运动时会导致控制失败,因此论文设计了一种采用极坐标形式的图像雅可比来解决问题,并采用LM算法以及比例控制来进行验证,实验结果证明该方法在涉及大旋转量的运动时更具鲁棒性,收敛速度更快的优点。
先端院2022级机械研究生洪培涛在“2023 4th International Conference on Big Data & Artificial Intelligence & Software”会议上发表一篇EI会议论文“Image-based 2D Form-closure Grasping Detection Method”,该论文是关于机器人抓取的二维形封闭点接触检测分析方法。论文通过灰度处理、阈值分割二值化、滤波降噪、边缘检测、查找轮廓、形态学处理运算、筛选轮廓、导出轮廓点集、轮廓法向量、向量运算、形封闭要求筛选等方式通过传统图像解析出二维形封闭的稳定抓取点,该方法满足形封闭抓取的同时也满足高效实时性解析。
6.科研荣誉
先端院无人系统实验室2021级研究生张舒舒荣获校级优秀团员,优秀团员需要深入学习党的重要思想,道德品质高尚,认真履行《团章》规定的权利义务,积极参加团的活动;刻苦学习,勤奋工作,锐意进取,在各类活动中起到了很好的带头作用。能够获得“优秀团员称号”,充分证明了张舒舒同学在学术研究和日常生活中的勤奋努力。
二、学科竞赛,“暑”创辉煌
在全国高校大力开展创新创业教育的大背景下,为引导和激励广大青年学生弘扬创新精神,搭建良好的科技创新赛事平台,助力人工智能、机器人产业发展,推动“互联网+”、“人工智能+”、“机器人+”新经济产业体系建设,先端科学技术研究院积极组织推动研究生、本科生参与机器人、人工智能科技创新实践,充分发挥学科竞赛在人才培养中的作用,提高团队协作水平、培育创新创业精神,并在几个重大赛事中斩获佳绩。
1.第九届中国国际“互联网+”大学生创新创业大赛
本届大赛以“我敢闯,我会创”为主题,以赛促教、以赛促学、以赛促创,探索人才培养新途径,深入推进新工科、新医科、新农科、新文科建设,深化创新创业教育改革,引领各类学校人才培养范式深刻变革,形成新的人才培养质量观和质量标准。培养创新创业生力军,着力造就拔尖创新人才,在创新创业中增长智慧才干,怀抱梦想又脚踏实地,敢想敢为又善作善成,做有理想、敢担当、能吃苦、肯奋斗的新时代好青年。搭建产教融合新平台,把教育融入经济社会发展,推动成果转化和产学研用融合,促进教育链、人才链与产业链、创新链有机衔接,以创新引领创业、以创业带动就业,推动形成高校毕业生更高质量创业就业的新局面。
在第九届中国国际“互联网+”大学生创新创业大赛中,先端院一共有两个项目参与,在朱留存教授、罗俊琦讲师的指导下取得优秀的成绩。其中《蚁后无忧——国内首创红火蚁察处一体机器人》项目获省金,《“天地空”一体化智慧农业系统》、《空气哨兵——低成本全时空PM2.5监测系统》项目获省铜。

2.中国机器人及人工智能机器人大赛
中国机器人及人工智能大赛是一项历史悠久、影响广泛的全国性学科竞赛。作为中国人工智能学会最早主办的竞赛之一,大赛已为我国培养了大量“能动手”、“敢创新”、“善协作”的复合型人才。大赛已列入中国高等教育学会发布的《2020年全国普通高等学校学科竞赛排行榜》《2021年全国普通高校大学生竞赛分析报告》。在第二十四届中国机器人及人工智能大赛(广西赛区)中,由先端科学技术研究院朱留存、罗俊琦、赵成龙等老师带领,获国家二等奖1项,省级一等奖2项,省级二等奖1项,省级三等奖2项。在朱留存、罗俊琦老师指导下,刘纪元、张振宇、经展鹏研究生团队作品“空气哨兵——低成本全时空PM2.5监测系统”获国家级(人工智能创新赛)二等奖,充分展现了我校在机器人及人工智能相关领域的人才培养质量。
3.“挑战杯”全国大学生课外学术科技作品竞赛
“挑战杯”是挑战杯全国大学生系列科技学术竞赛的简称,是由共青团中央、中国科协、教育部和全国学联共同主办的全国性的大学生课外学术实践竞赛,“挑战杯”竞赛在中国共有两个并列项目,一个是“挑战杯”中国大学生创业计划竞赛,另一个则是“挑战杯”全国大学生课外学术科技作品竞赛。这两个项目的全国竞赛交叉轮流开展,每个项目每两年举办一届。在第十一届“挑战杯”广西大学生创业计划竞赛中,先端院一共有两个项目参与,在朱留存教授、罗俊琦讲师的指导下取得优秀的成绩。其中《空气哨兵——低成本全时空PM2.5监测系统》项目获省铜,《蚁后无忧——国内首创红火蚁察处一体机器人》项目获省铜。

空气哨兵——低成本全时空PM2.5监测系统团队
蚁后无忧——国内首创红火蚁察处一体机器人
4.第六届中国高校智能机器人创意大赛
中国高校智能机器人创意大赛以培养学生创意性和创造力为特色和重点,通过搭建展示、交流和推介平台,促进机器人领域的教育链、人才链、创新链、产业链“四链融合”,正在发挥积极的作用。六年前,该赛事在余姚创设诞生,并在创新的道路上不断升华内涵,提升质量。在朱留存教授的指导下赵启鹏带领团队项目《基于机器视觉的智能扫地机器人的垃圾检测与分类》在第六届中国高校智能机器人创意大赛中获得国家级三等奖。
中国高校智能机器人创意大赛中获得国家级三等奖

充实而丰富多彩的假期生活落下帷幕,满满的都是快乐和收获!新学期里,先端院学子们将更加刻苦努力学习,在创新创业大道上奋勇前行!


